本项目为我本科第四学期《数字系统》课程期末项目。
目标
本项目的目标是开发一个寻光机器人,使用 BASYS 3 FPGA 开发板、OV7670 摄像头,以及通过 PMOD HB5 H-Bridge 驱动的一组电机。编程使用 Vivado 与 VHDL 完成。
由于这是课程项目,我们以小组形式分工合作,分别开发不同模块。我所在的小组负责根据光源的位置与大小输入,决定机器人的运动方向与速度。
步骤
- 定义需求:输入/输出以及模块间通信(课堂讨论完成)
- 设计模块的数字系统
- 将数字系统转换为 VHDL 代码
- 将各模块整合为完整系统
- 在原型上进行测试
模块设计
本项目与阈值处理小组以及电机控制与测速小组紧密合作完成。
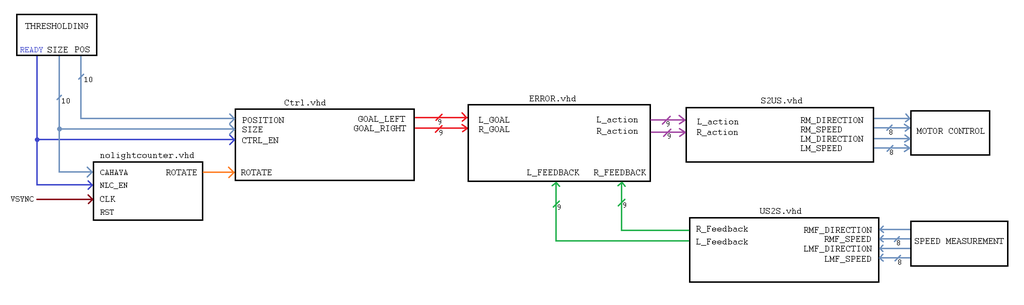
阈值处理模块输出光源的位置(10 位光强与位置数据)。如果没有检测到光源,nolightcounter.vhd 模块会让机器人先原地旋转 360 度后停止。否则,根据光源的大小与位置,控制模块(Ctrl.vhd)决定机器人向左、向右、前进或后退。
随后,左右电机的目标速度会与实际速度在误差模块(ERROR.vhd)中进行比较,从而计算所需的电机控制信号。S2US.vhd 与 US2S.vhd 模块用于有符号与无符号数据之间的转换,并与电机测速模块进行连接。
原型
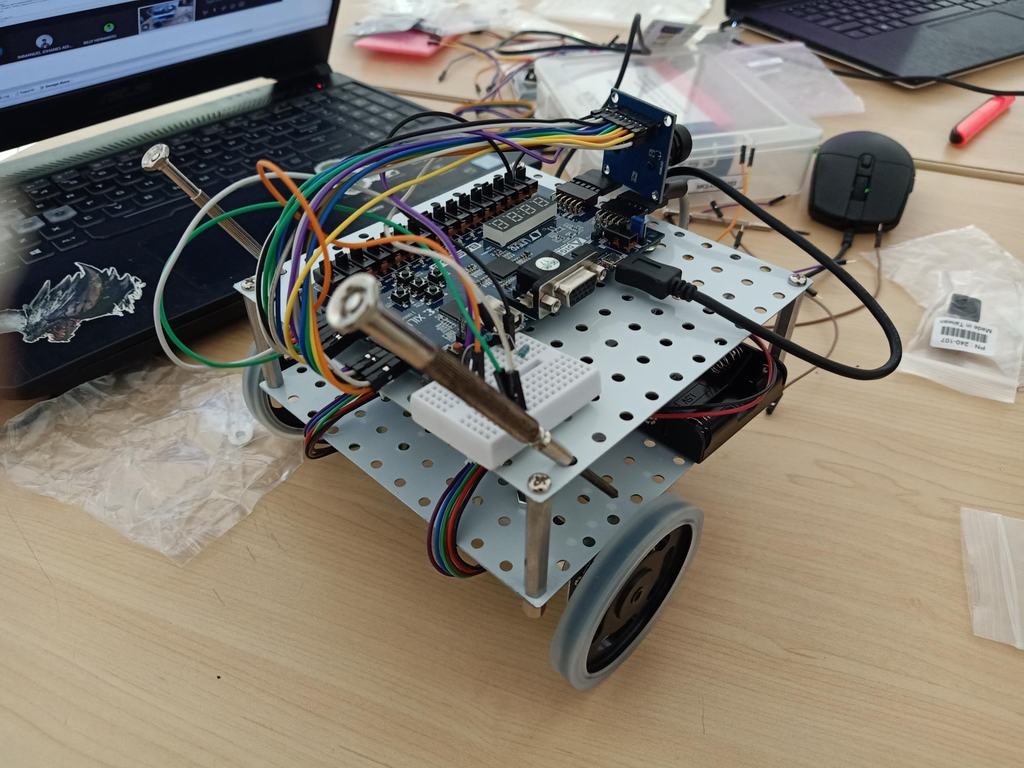
注:由于硬件方面存在问题,加上当时处于疫情期间,我们没有足够时间完成整个项目的调试与收尾。
贡献
作为小组组长,我负责协调团队任务分工,推动各子模块开发,并代表小组参与课堂讨论与汇报。
教程
我们将该项目的制作教程发布在 Instructables